
David Porfirio, Ph.D.
Assistant Professor
Computer Science Department
George Mason University
![]()
![]()
![]()
![]()
![]() Lab: Autonomous Robot Interaction Laboratory
Lab: Autonomous Robot Interaction Laboratory
Office: Fuse 7310
Teaching:
F26: CS685 Autonomous Robotics
S26: CS690 Human-Robot Interaction
F25: CS690 Evaluating GenAI Systems
About Me
I am an Assistant Professor of Computer Science at George Mason University, where I lead the Autonomous Robot Interaction (ARI) Laboratory. I am also a member of the Mason Autonomy and Robotics Center.
Research Interests
Check out my lab website for a full list of projects, updates, and software that we're working on.
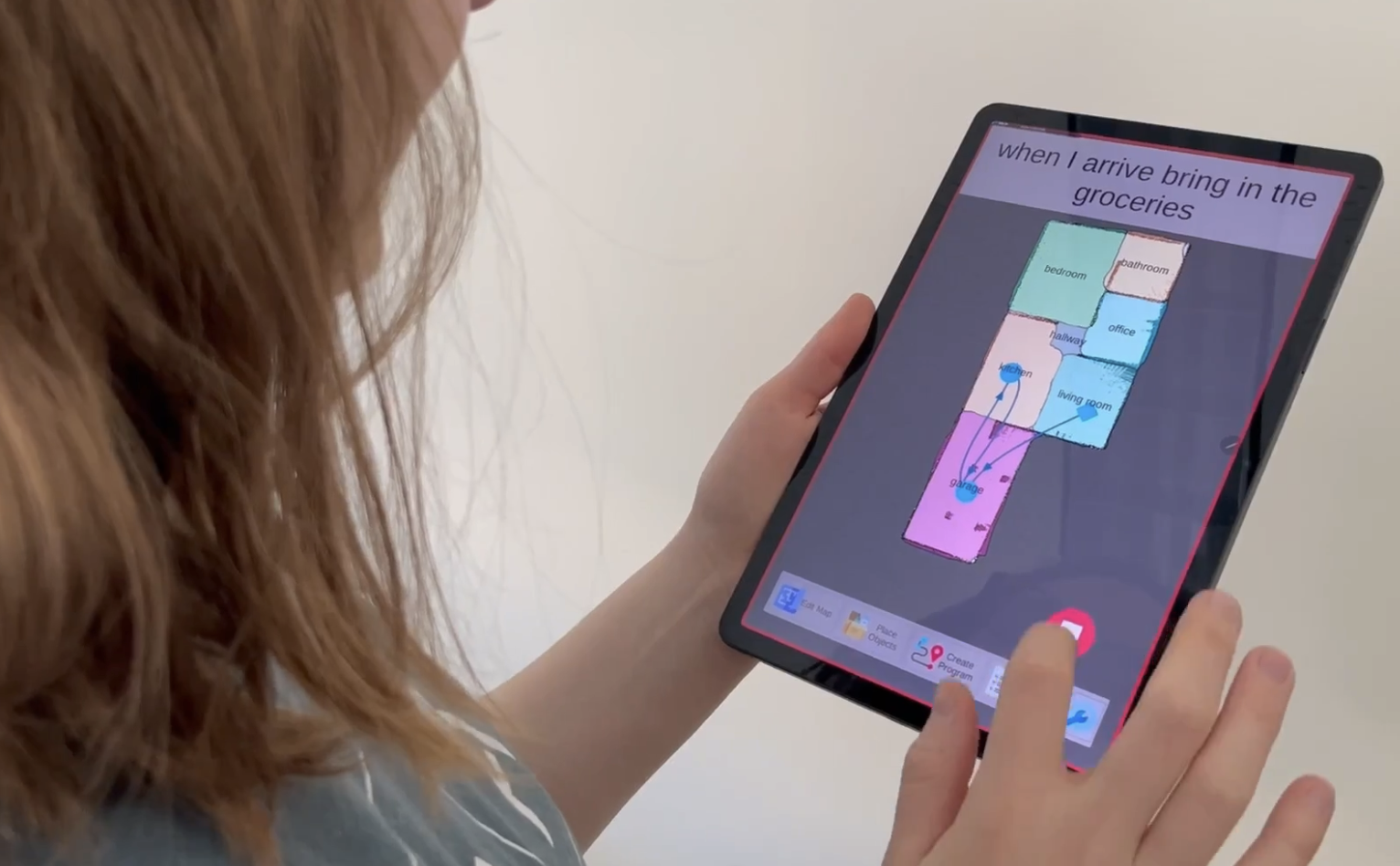
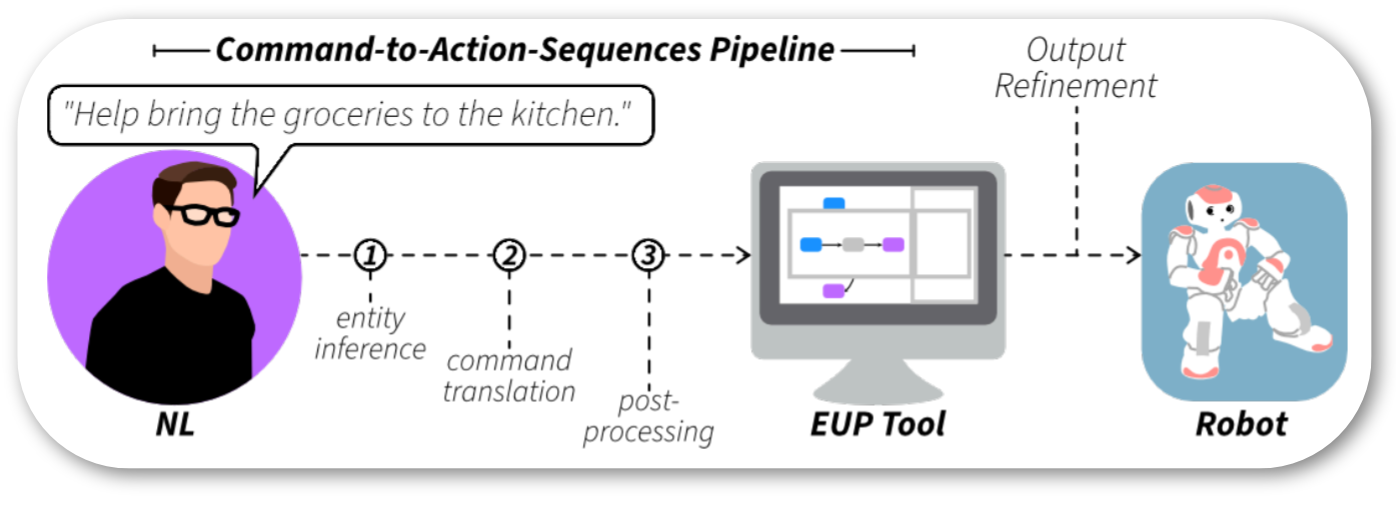
End-User Robot Programming
UIST18, UIST19, CHI20, CHI21, HRI23, HRI24, DIS24, FTROB, DIS26
End-user programming, or EUP for short, focuses on enabling people with a variety of backgrounds and abilities to express long-horizon tasks for robots to perform. My work spans multimodal user interfaces and programming languages, representations, and paradigms for capturing user intent and translating this intent to an executable form.
User-Guided Robot Planning
HRI24, HRI25, CHI25, AAMAS25, ROMAN25, DIS26
Through automated task planning, robots can automatically decide the actions that are necessary in order to achieve a goal. But these robots still require copious amounts of information from end users, including the goals for it to achieve, preferences for how to achieve these goals, and domain knowledge that only they know. I am interested in eliciting this information from users and designing approaches for robots to operationalize this information effectively.
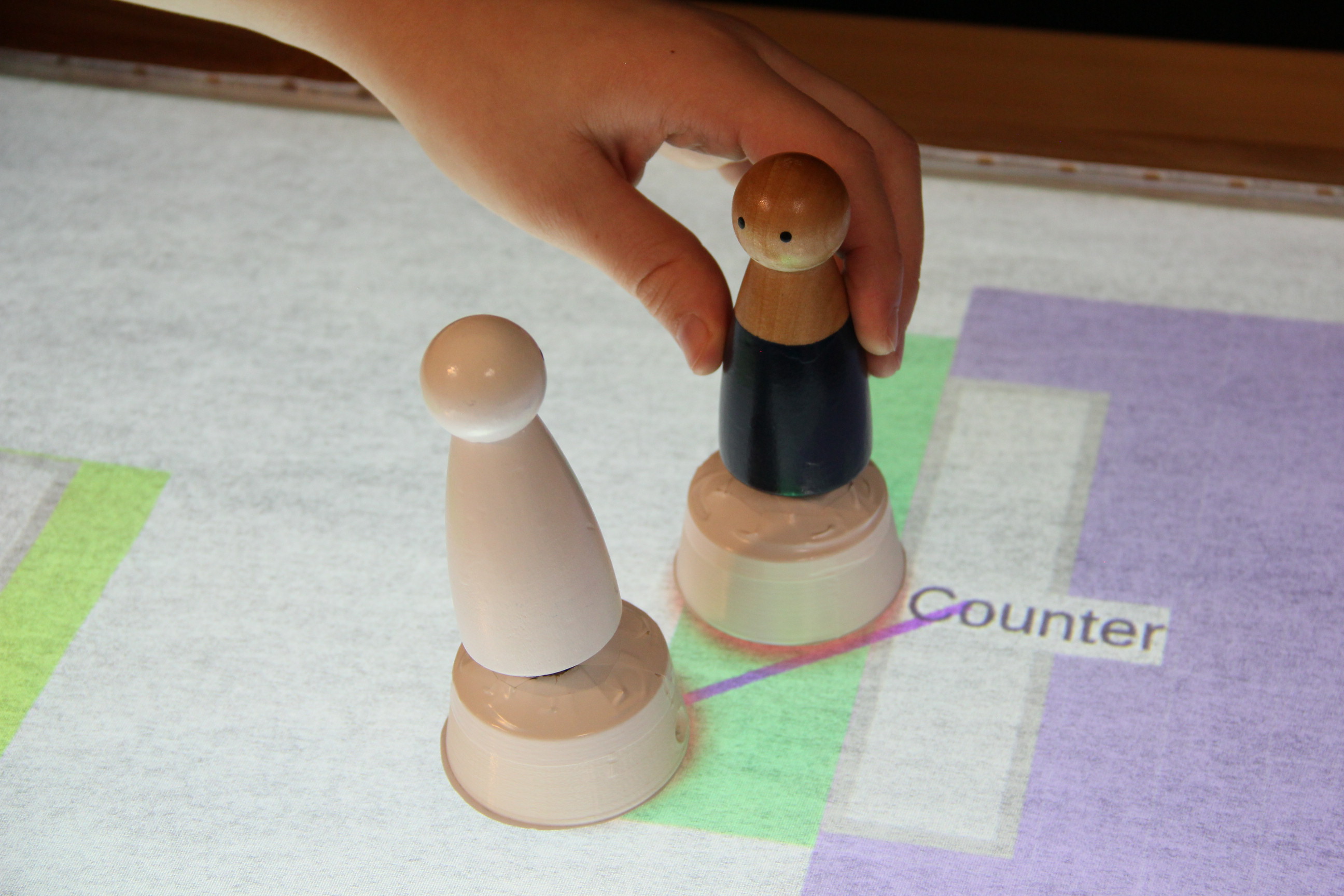

Robot Representations
A lot of my work seeks to answer the question, how should we computationally represent the knowledge that a robot requires in order to reliably complete tasks in the real world? In seeking to answer this question, I co-organize the annual symposium on Unified Representations for Robot Application Development.

Robot Wranglers
I have increasingly become interested in not just the end users of robots, but also the larger ecosystem of people that affect or are affected by robots in different ways—bystanders, supervisors, researchers, maintainers, developers, etc.
This page is modified version of minimal-jekyll (MIT licence). Link icons are from Super Tiny Icons (MIT license).