
David Porfirio, Ph.D.
Assistant Professor
Computer Science Department
George Mason University
![]()
![]()
![]()
![]()
![]()
About Me
My research intersects
You can find my CV here.
News
Projects
Human-Like LLM Planning
RO-MAN 2025
Evaluates the ability of four different LLMs to produce human-like plans.
Uncertainty Expression
AAMAS 2025
Three different interfaces for eliciting probability distributions from users.

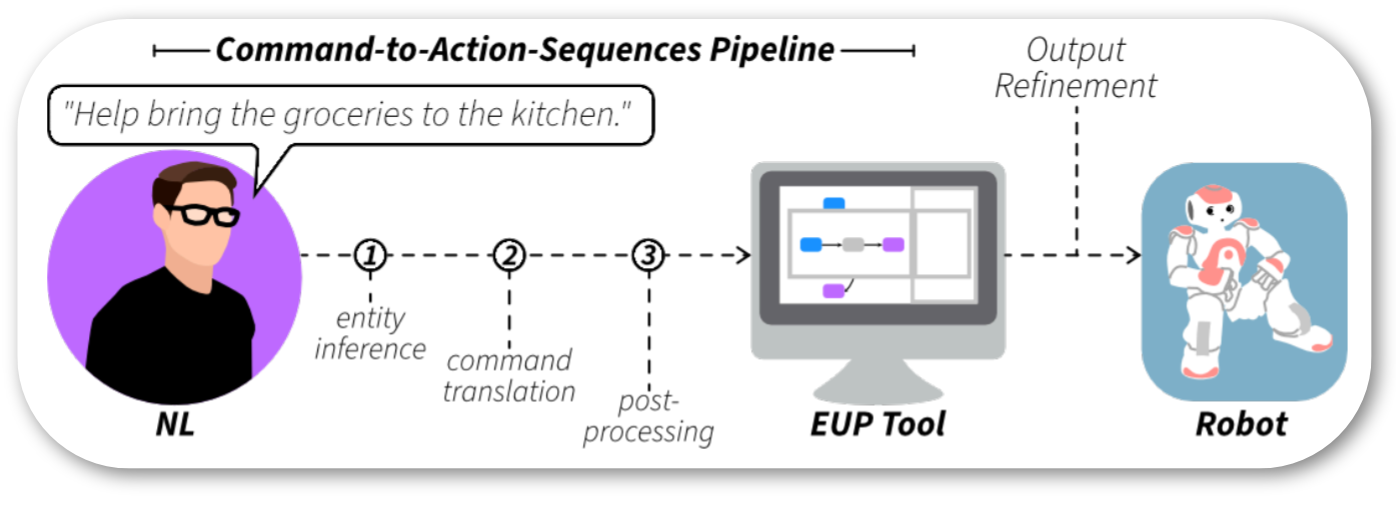
POLARIS
HRI 2024
Robot end-user programming with assistance from AI planning.

INTERACTION SPECIFICATION LANGUAGE
UR-RAD 2023
RO-MAN 2023
AAAI Spring Symposium 2023
Standardizing robot application development via a common, intermediate representation.
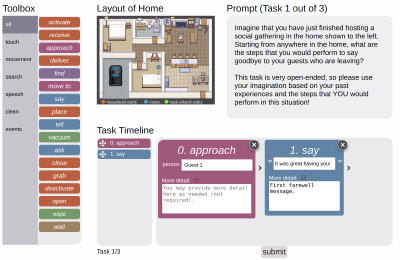
CROWDSOURCING TASK TRACES
HRI 2023 LBR
Collecting examples of step-by-step tasks through an easy-to-use crowdsourcing interface.
This page is modified version of minimal-jekyll (MIT licence). Link icons are from Super Tiny Icons (MIT license).